Windigipet-Funktionsdecoder ohne Schaltdecoder: Unterschied zwischen den Versionen
(Die Seite wurde neu angelegt: „300px ==Funktionsbaustein oder Funktionsdecoder== Damit wird an einer bestimmten Stelle jedes DC-Car, auch…“) |
K |
||
| Zeile 9: | Zeile 9: | ||
Bei DC-Car können aber auch andere Befehle zur Steuerung von Beleuchtung und Geschwindigkeit übermittelt werden.<br> | Bei DC-Car können aber auch andere Befehle zur Steuerung von Beleuchtung und Geschwindigkeit übermittelt werden.<br> | ||
<br> | <br> | ||
| − | So können Fahrpläne oder Routen | + | So können Fahrpläne oder Routen abgearbeitet werden ohne das Rückmelder gerbaucht werden.<br> |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
<br> | <br> | ||
===Mögliche Steuerung=== | ===Mögliche Steuerung=== | ||
| Zeile 19: | Zeile 15: | ||
So kann ein Ausgang (z.B. Stop) mehrfach benutzt werden.<br> | So kann ein Ausgang (z.B. Stop) mehrfach benutzt werden.<br> | ||
<br> | <br> | ||
| − | Bei der Digitalsteuerung werden | + | ===Verschiedene Befehle steuern=== |
| − | + | Der Funktionsdecoder hat eine Digitaleingang und kann mit Adressen 1,9,17...801 usw. benutzt werden.<br> | |
| + | Die 7 folgenden Adressen liegen fest.<br> | ||
| + | Bei der Digitalsteuerung werden Magnetartikeladresse geschaltet im DCC-Format.<br> | ||
| + | Dadurch können alle 8 Befehler mit den 8 Adressen AUS bzw AN geschaltet werden.<br> | ||
<br> | <br> | ||
| − | Durch Kombination über Dioden können mehrere Befehlsausgänge zusammen auf einen [[IR-Strahler]] gegeben werden.<br> | + | Durch Kombination über Dioden können mehrere Befehlsausgänge zusammen auf '''"einen"''' [[IR-Strahler]] gegeben werden.<br> |
So kann zu einem Stopsignal auch '''Licht AN''' oder '''Licht AUS''' dazugeschaltet werden. (nur nicht an und aus gleichzeitig)<br> | So kann zu einem Stopsignal auch '''Licht AN''' oder '''Licht AUS''' dazugeschaltet werden. (nur nicht an und aus gleichzeitig)<br> | ||
<br> | <br> | ||
| − | === | + | ===IR-Strahler=== |
| − | + | Ein IR-Strahler braucht immer einen Widerstand. Da der Funktionsdecoder keine Widerstände auf der Platine hat, kann der Wert unterschiedlich angewendet werden.<br> | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | Ein IR-Strahler braucht immer einen Widerstand. | + | |
27-150 Ohm große Reichweite<br> | 27-150 Ohm große Reichweite<br> | ||
150-470 Ohm kleine Reichweite<br> | 150-470 Ohm kleine Reichweite<br> | ||
| Zeile 49: | Zeile 42: | ||
===ein weiterer Trick=== | ===ein weiterer Trick=== | ||
Der feine Unterschied steckt im Detail. Ein modernes DC-Car kann es besser.<br> | Der feine Unterschied steckt im Detail. Ein modernes DC-Car kann es besser.<br> | ||
| − | Ein kleine Änderung an der CV19 und das Fahrzeug bremst weich herunter.<br> | + | Ein kleine Änderung an der CV19=64 und das Fahrzeug bremst weich herunter.<br> |
So bremst das DC-Car ca. 20 cm vor der Haltestelle auf Fahrzustufe 14 herunter bremsen. Das sieht schon viel besser aus.<br> | So bremst das DC-Car ca. 20 cm vor der Haltestelle auf Fahrzustufe 14 herunter bremsen. Das sieht schon viel besser aus.<br> | ||
<br> | <br> | ||
=== Es geht noch besser=== | === Es geht noch besser=== | ||
| − | Mit einem speziellen Funktionsdecoder oder einerm AS Tiny wird ein anderer Befehl benutzt.<br> | + | Mit einem speziellen Funktionsdecoder einstellung oder einerm AS Tiny wird ein anderer Befehl benutzt.<br> |
Statt der festen Fahrstufe 14 wird Fahrstufe -2 gesendet.<br> | Statt der festen Fahrstufe 14 wird Fahrstufe -2 gesendet.<br> | ||
| − | Das DC-Car wird durch den Befehl in einem bestimmten Rhytmus auf eine Mindestgeschwindigkeit | + | Das DC-Car wird durch den Befehl in einem bestimmten Rhytmus auf eine Mindestgeschwindigkeit heruntergefahren.<br> |
| − | Die Werte sind in jedem DC-Car mit einem Decoder ab DC07 durch CV´s einstellbar. <br> | + | Die Werte sind in jedem DC-Car mit einem Decoder ab DC07 durch CV´s einstellbar. CV98 und CV99 <br> |
<br> | <br> | ||
<hr> | <hr> | ||
[[Kategorie:Windigipet]] | [[Kategorie:Windigipet]] | ||
[[Kategorie:DC-Car-System]] | [[Kategorie:DC-Car-System]] | ||
{kind=link}
Version vom 24. August 2023, 01:30 Uhr
Inhaltsverzeichnis
Funktionsbaustein oder Funktionsdecoder
Damit wird an einer bestimmten Stelle jedes DC-Car, auch mit Standardausstattung, gesteuert.
Deshalb können auch kleine PKW und alte Decoder benutzt werden.
Es wird nur der Befehl gesendet, der an "dieser Stelle" ausgeführt werden soll.
Das funktioniert ähnlich wie die bei den magnetischen Stopstellen von Faller-Car-System.
Bei DC-Car können aber auch andere Befehle zur Steuerung von Beleuchtung und Geschwindigkeit übermittelt werden.
So können Fahrpläne oder Routen abgearbeitet werden ohne das Rückmelder gerbaucht werden.
Mögliche Steuerung
Die einzelnen Ausgänge können mit Schaltern, Relais, Schaltdecoder und Servodecoder S4Car S4 getrennt geschaltet werden.
So kann ein Ausgang (z.B. Stop) mehrfach benutzt werden.
Verschiedene Befehle steuern
Der Funktionsdecoder hat eine Digitaleingang und kann mit Adressen 1,9,17...801 usw. benutzt werden.
Die 7 folgenden Adressen liegen fest.
Bei der Digitalsteuerung werden Magnetartikeladresse geschaltet im DCC-Format.
Dadurch können alle 8 Befehler mit den 8 Adressen AUS bzw AN geschaltet werden.
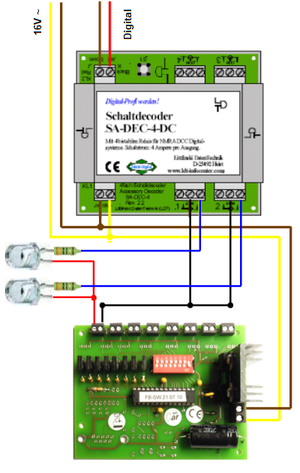
Durch Kombination über Dioden können mehrere Befehlsausgänge zusammen auf "einen" IR-Strahler gegeben werden.
So kann zu einem Stopsignal auch Licht AN oder Licht AUS dazugeschaltet werden. (nur nicht an und aus gleichzeitig)
IR-Strahler
Ein IR-Strahler braucht immer einen Widerstand. Da der Funktionsdecoder keine Widerstände auf der Platine hat, kann der Wert unterschiedlich angewendet werden.
27-150 Ohm große Reichweite
150-470 Ohm kleine Reichweite
330-1000 OHm sehr kleine Reichweite.
Das kann man nutzen und einen weiteren Befehl, über Dioden gekoppelt, auf den IR-Strahler geben.
| Stop | Klemme 1 | 470 Ohm |
| FS14 | Klemme 7 | 47 Ohm |
Jetzt bremst das DC-Car weit vor der Stopstelle ab und hält an der Haltelinie an.
Mit dieser Technik schaltet das DC-Car direkt auf Fahrstufe 14 herunter um dann anzuhalten.
ein weiterer Trick
Der feine Unterschied steckt im Detail. Ein modernes DC-Car kann es besser.
Ein kleine Änderung an der CV19=64 und das Fahrzeug bremst weich herunter.
So bremst das DC-Car ca. 20 cm vor der Haltestelle auf Fahrzustufe 14 herunter bremsen. Das sieht schon viel besser aus.
Es geht noch besser
Mit einem speziellen Funktionsdecoder einstellung oder einerm AS Tiny wird ein anderer Befehl benutzt.
Statt der festen Fahrstufe 14 wird Fahrstufe -2 gesendet.
Das DC-Car wird durch den Befehl in einem bestimmten Rhytmus auf eine Mindestgeschwindigkeit heruntergefahren.
Die Werte sind in jedem DC-Car mit einem Decoder ab DC07 durch CV´s einstellbar. CV98 und CV99